

At the intersection of imagination and technology, the concept of artificial beings has fascinated humanity since ancient times. However, it was not until the 20th century that these dreams took on a tangible form, stepping out of the pages of fiction and into the real world. The early 1900s marked an era of profound innovation, witnessing the birth of the first automatons that would lay the foundation for modern robotics.
Early Concepts and Cultural Fascination
Before they were built, robots captured minds through science fiction. Writers like Karel Čapek, who famously coined the term “robot” in his 1920 play “R.U.R. (Rossum’s Universal Robots),” ignited the public’s imagination with visions of manufactured, artificial workers. These early cultural representations were crucial, feeding curiosity and inspiring the era’s inventors to turn fiction into reality.
1927: The Television’s Mechanical Man
One of the first instances of a working robot model was “Televox,” built in 1927 by Westinghouse Electric Corporation. Unlike the sophisticated robots of today, Televox had a simple design, operating via voice commands over telephone lines, demonstrating basic tasks like waving a flag or moving small objects. While rudimentary, Televox showcased the potential of human-machine interaction, a concept at the heart of modern robotics.
1930s: The Westinghouse Wonders
Building on Televox’s success, Westinghouse created “Herbert Televox’s” successor: a humanoid robot named “Elektro,” unveiled at the 1939 World’s Fair. Standing over seven feet tall, Elektro could walk, talk using a 78-rpm record player, smoke cigarettes, and perform simple tasks, amazing fairgoers and solidifying public interest in automatons.
Around the same time, “Sparko,” a robotic dog, was created as a companion for Elektro, simulating animal behavior and interactions, highlighting the desire to make robots more relatable and human-like.
1940s-1950s: Robotics Meets Computation
The mid-20th century’s technological advancements set the stage for a robotics revolution. With the development of early computers, inventors began integrating computational technology with physical machinery. The “Turtle Robots” (or “Tortoises”) created by William Grey Walter in the late 1940s demonstrated complex behaviors with simple electronic circuits, foraging and navigating obstacles, displaying the possibilities of autonomous machines.
In the 1950s, George Devol and Joseph Engelberger teamed up to change industrial manufacturing forever, patenting the first programmable robot and founding the company Unimation. Their creation, the “Unimate,” was installed at General Motors in 1961, executing basic tasks while introducing the era of automation in industry.
These pioneering robots were far from the high-tech androids we envision today, but they were monumental in propelling the field of robotics forward. Each represented a significant leap in technology, embodying the dreams of creators who believed in a world where human endeavor could be amplified by mechanical counterparts.
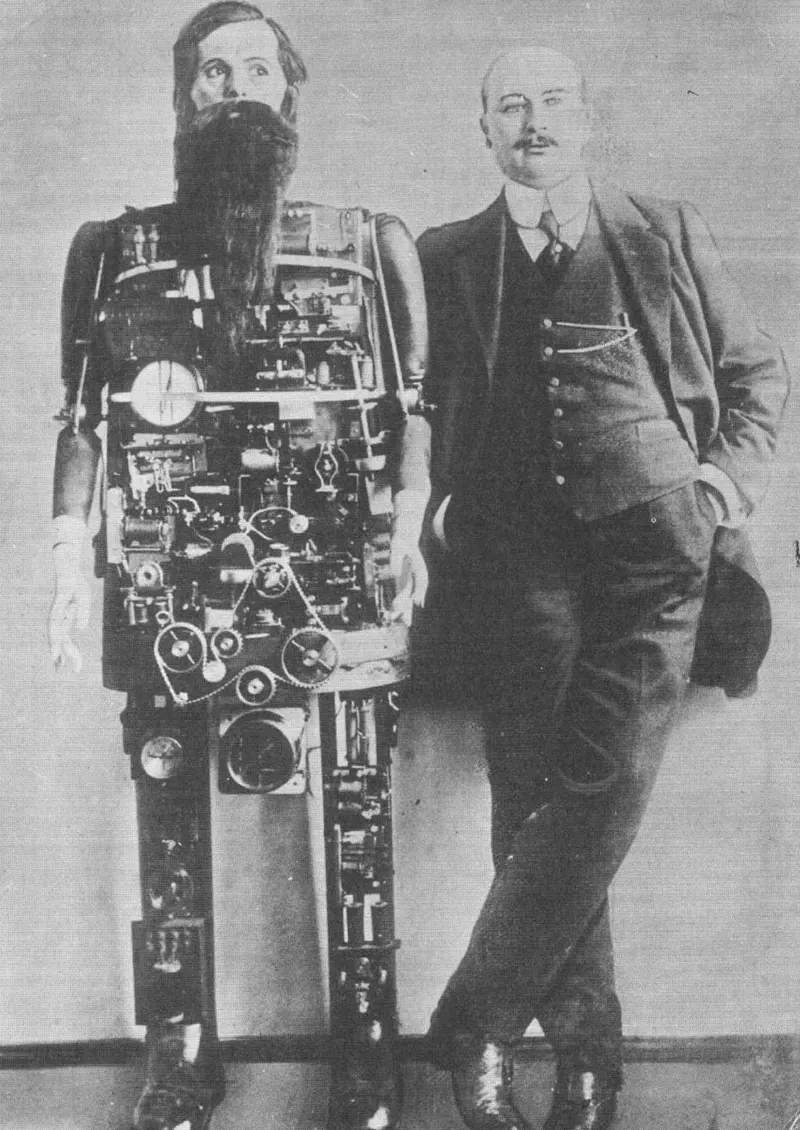
#1 Yasutaro Mitsui’s Robot, 1930
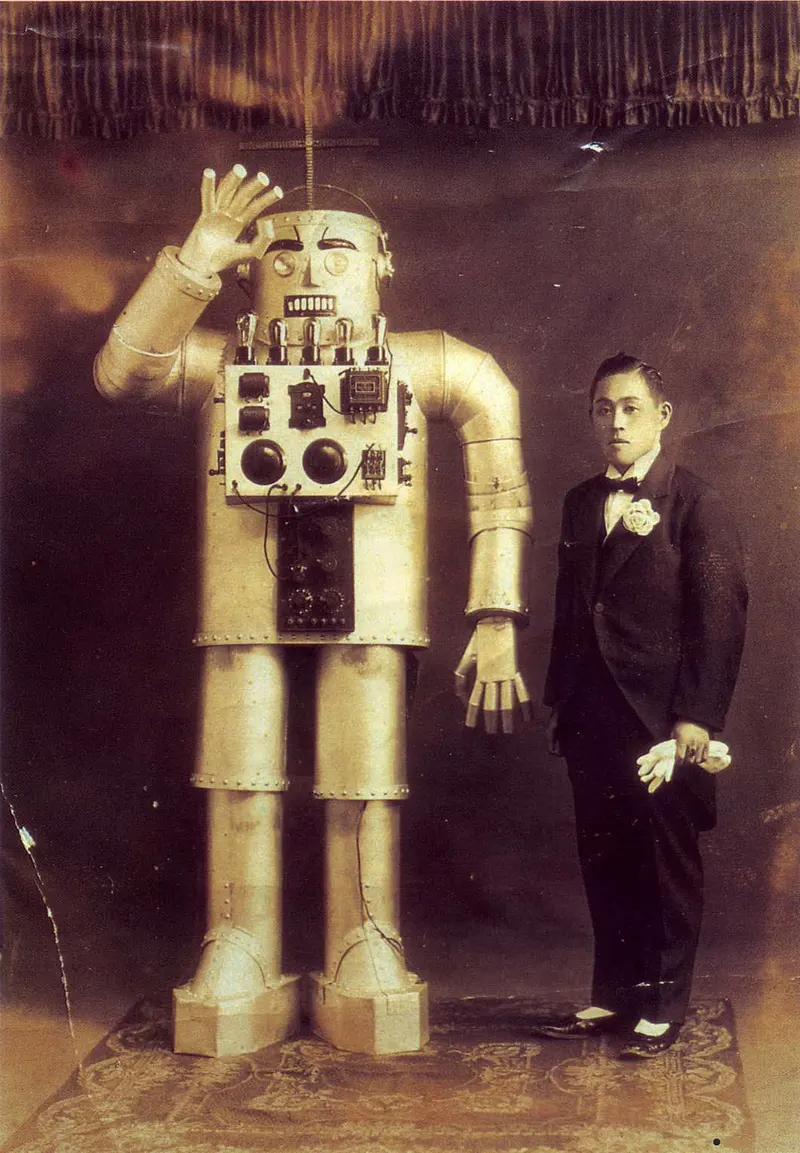
Designed in a humanoid form, this robot was a complex assembly of gears, levers, and motors, encapsulating the aesthetic and scientific spirit of the early 20th century. Its exterior showcased visible electrical components and valves, intricately integrated into its structure, suggesting a functional purpose but primarily serving an aesthetic role influenced by contemporary artistic sensibilities and the visual aspects of previous models like the Televox.
The robot's physical configuration was meticulously crafted to mimic human anatomy, an ambitious endeavor considering the technological constraints of the period. Though not advanced in functionality by today's standards, the robot could perform a series of basic movements, controlled by a rudimentary system that, for its time, was revolutionary. The simplicity of the robot’s controls often belied the sophistication of the internal mechanisms and the skill required for its operation.
#2 El Chispas Robot, Spain, 1953
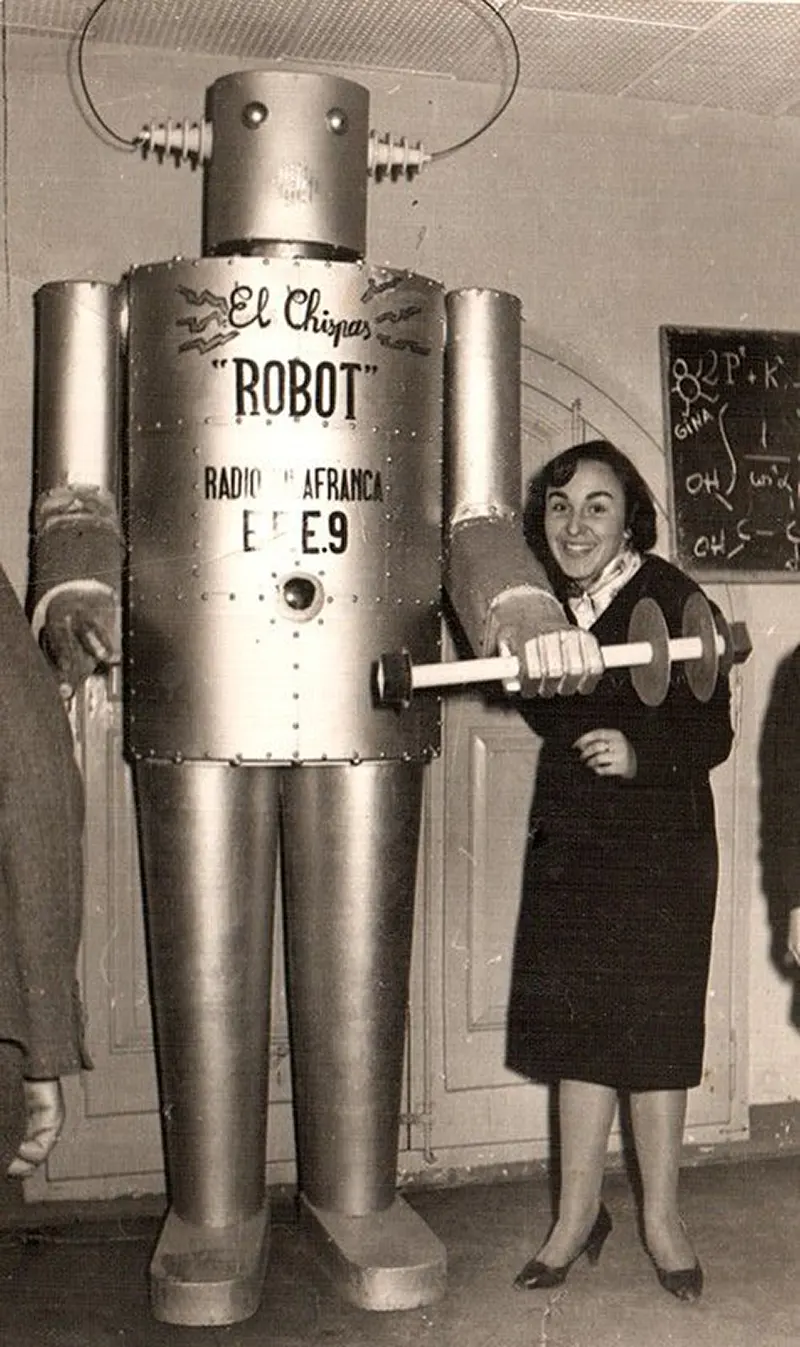
"El Chispas," crafted in 1953, was an innovative robot that marked an era of robotic exploration in Spain. This creation, stemming from the collaborative efforts of Antoni Gual Segura and his peers at Radio Vilafranca, was a spectacle of engineering and creativity for its time. With its humanoid structure, "El Chispas" was primarily built from materials common in radio technology, indicative of the creators' backgrounds and resourcefulness.
One of the most distinctive features of "El Chispas" was its ability to simulate speech. Although it couldn't hold conversations, the robot was able to emit pre-recorded phrases through an internal speaker system. This function, quite advanced for its period, was a source of amazement and represented the early integration of audio technology in robotics.
The robot's physical capabilities included basic arm movements, which, while limited, personified the machine, bringing it to life in the eyes of the beholders. These movements were typically mechanically powered by internal motors, operated by direct control, emphasizing the hands-on interaction between "El Chispas" and its operators.
#3 Superman Dennis the Robot, 1939
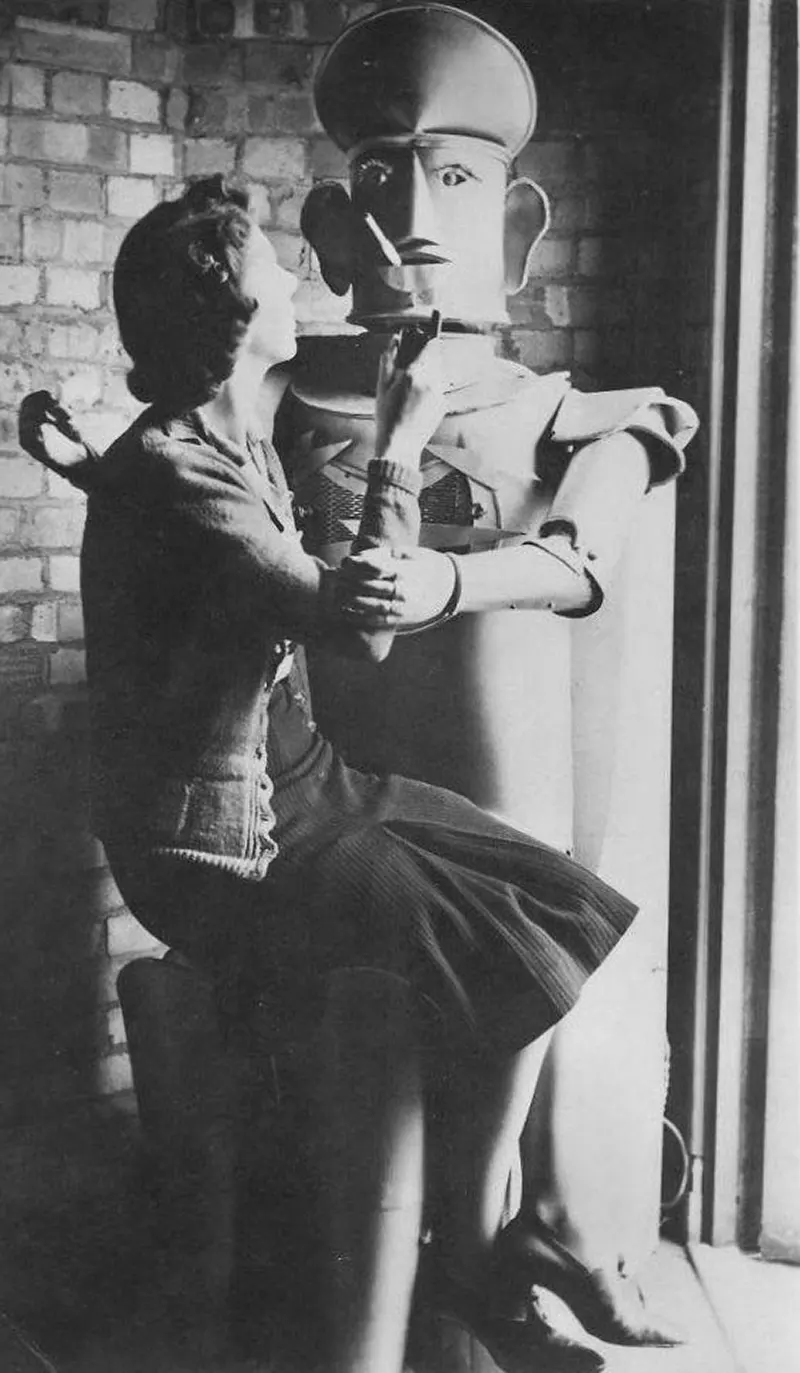
Crafted by inventor Charles Lawson, this 7-foot-tall humanoid robot was an ambitious project that showcased the technological zest of the era and was designed to interact with the world in ways that, at the time, seemed futuristic. One of the robot's key functionalities was its claimed ability to control traffic. While it didn't autonomously manage traffic flows, it could likely perform simple movements or gestures, perhaps with lights or signs, mimicking a traffic officer's signals. This function was particularly symbolic, representing society's trust in machines and their potential role in maintaining order.
Furthermore, "Superman Dennis" was said to entertain audiences by singing, a feature achieved through phonograph technology or a similar audio playback device installed within. This capability, though not an indication of the robot understanding music, displayed early multimedia integration into robotics, transforming a machine into a source of amusement.
#4 Mobot, 1961

Mobot, introduced in 1961 by Hughes Aircraft Electronic Labs, represented a significant leap in the robotics field during the early 1960s. This colossal machine, comparable in size to multiple large refrigerators, was an engineering marvel designed to bring the concept of personal robotics closer to everyday life.
One of Mobot's standout features was its promise to automate personal grooming tasks. It was envisioned to have the dexterity and precision necessary for tasks like manicuring, handling a zipper, or assisting with hair combing. These functions would require a sophisticated level of fine motor control and responsiveness from the robot, an ambitious goal given the technological constraints of the time. The intention behind these abilities was to demonstrate the potential for robots to engage in delicate, precise tasks, indicating a future where robotic assistance could extend beyond industrial or simple domestic tasks to more intimate, personal aspects of daily living.
#5 NASA’s 1965 Space Suit Test Robot Machine
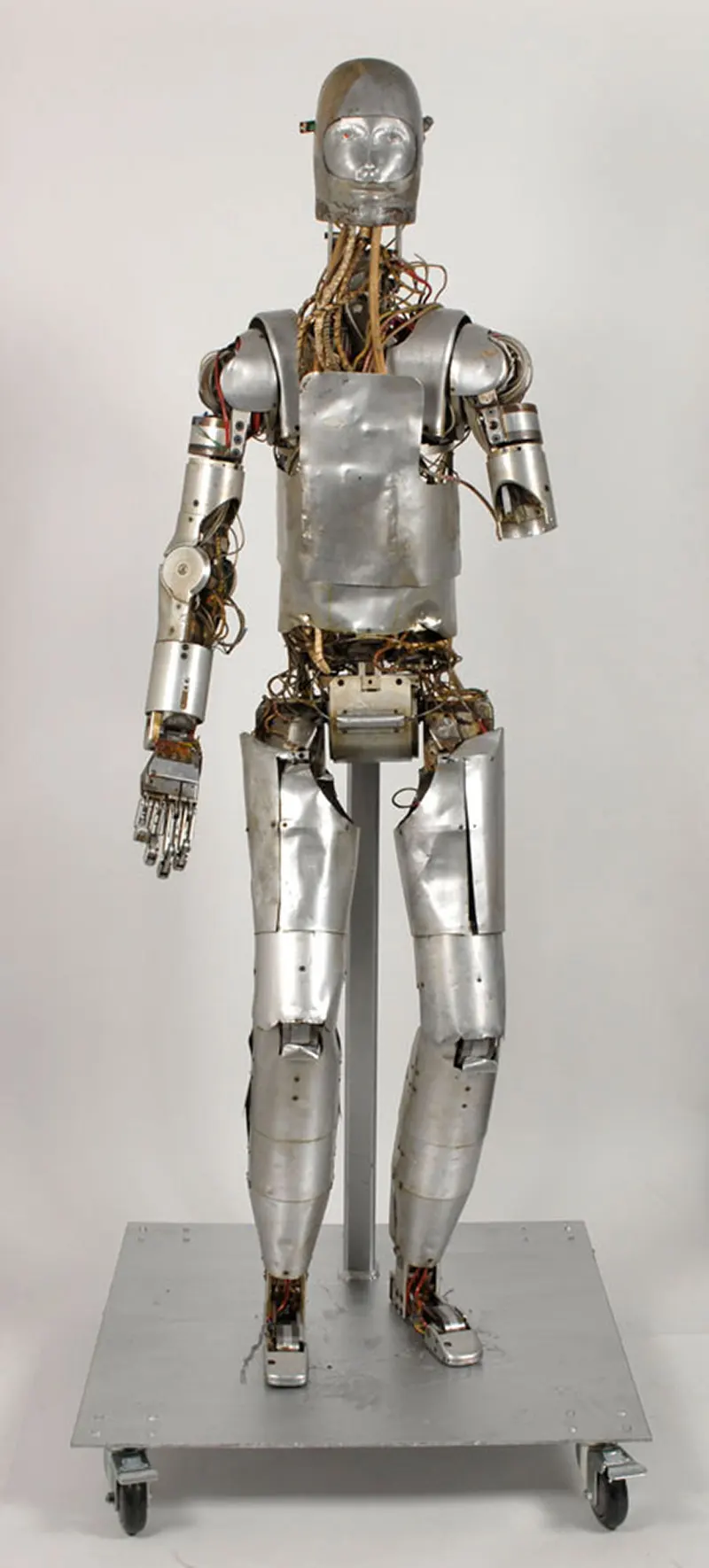
This hydraulic-powered android, developed by the IIT Research Institute in Chicago, was an early example of mimicking human physiology with machinery to ensure astronauts' safety and well-being during space missions. The robot, advanced for its time, could simulate 35 basic human motions, thanks to its articulated structure. This range of movements allowed NASA to conduct comprehensive tests on prototype spacesuits under conditions that would replicate an astronaut's activities in space. The ability to mimic human motions was crucial in assessing the suit's flexibility, resistance, and durability, particularly in environments where traditional testing methods were insufficient.
Equally innovative was the robot's sensory system. With sensors installed at each joint, the machine could measure the precise forces that a pressurized spacesuit exerted on the body. These measurements were vital in understanding the physical strains astronauts would experience and in making necessary adjustments to the spacesuits' design to optimize safety and comfort during missions.
#6 Sepulka of Soviet Union, 1962

Sepulka, the robotic guide created in 1962 in the Soviet Union, marked an intriguing development in the field of interactive robotics during a period when technology was rapidly evolving. Conceived in an experimental workshop of the All-Union Society "Znanie," designers M. Aleksandrov and art director M. Gorokhov were instrumental in bringing this mechanical entity to life, with its capabilities being notably sophisticated for the era.
One of Sepulka's defining features was its ability to reproduce speech through a built-in tape recorder. This pre-recorded audio allowed Sepulka to 'communicate' with individuals around it, providing information or guidance in various settings. The use of a tape recorder, while rudimentary compared to modern digital technology, was a practical approach to giving the robot a voice, enhancing its interactive capabilities and making it more relatable to humans.
In addition to verbal communication, Sepulka was designed with mobility in mind and could be operated via remote radio control from distances of up to 20 meters. This feature allowed operators to direct Sepulka's movements, guiding it around various environments and through groups of people, perhaps during exhibitions or as part of educational demonstrations. The ability to control the robot's navigation from a distance added a layer of dynamic interaction, making Sepulka more autonomous in appearance.
#7 Freddie Ford, 1960

Freddie Ford was a unique promotional robot created in the 1960s, embodying the era's fascination with robots and the future of automation. What set Freddie apart was his construction: he was a towering nine-foot figure made almost entirely from Ford car parts, representing a creative fusion of automobile engineering and robotic aspirations.
His physical characteristics were a testament to automotive ingenuity, with oil pans serving as feet and brake shoes transformed into hands, suggesting strength and reliability—qualities desirable in both robots and vehicles. His ears, crafted from radiator caps with car antennas, and eyes made from Ford Mustang parking lights, were particularly ingenious adaptations, giving Freddie a semblance of sensory organs while maintaining his automotive theme. The choice of a Ford Thunderbird reversing light for his mouth added character, implying communication ability, though in reality, his interactions were limited.
Freddie's mobility was notably restricted; his primary functions were more performative than practical. His large frame, built with exhaust pipe arms and shock absorber legs, wasn't designed for versatile movement. Instead, his imposing presence served as a visual spectacle, drawing attention at car shows and helping to promote Ford's brand and products.
#8 Cosmos the Robot, France, 1958

In 1958, France introduced an intriguing technological spectacle named "Cosmos," a robot that captured the imagination of the public during a science exhibition along the Seine. This event marked a period of fascination with space, automation, and futuristic concepts, and "Cosmos" embodied these elements in a uniquely engaging way.
Constructed with a human-like form, "Cosmos" was not just a static exhibit but was portrayed as capable of driving a vehicle. This was a profound depiction for the time, suggesting a future where automation could rival human skill and precision, even in tasks as complex and nuanced as driving. The very idea of a robot navigating the bustling streets of Paris was a provocative concept, challenging the attendees' perception of technology's role and capabilities."
Cosmos" was also a part of a larger narrative within the exhibition, positioned next to a helicopter, another symbol of cutting-edge technology at the time. This placement was strategic, offering a dual representation of human ingenuity: a machine that could conquer the skies and one that suggested the potential of artificial beings possibly navigating our roads. This juxtaposition symbolized the era's forward momentum, with technology pushing the boundaries of what was possible in every direction.
#9 Robo Sensor, 1982

Featured in the Weekly Reader, this Japanese innovation was equipped with special sensors allowing it to perform tasks that went beyond basic programmable functions, embodying the era's growing fascination with intelligent machines.
One of Robo Sensor's notable features was its ability to shake hands with humans, a simple act loaded with implications. While engaging in this common social interaction, the robot used its built-in sensors to measure the person's grip strength and body temperature. These measurements could then be displayed, providing immediate data from the interaction and showcasing an early example of real-time feedback in robotics. Moreover, the robot was programmed not just to collect data but to respond to it. For instance, it might comment on the firmness of a person's handshake with phrases like "WOW, what a grip!" This level of interaction was relatively advanced for the period, indicating a move towards more personalized and social roles for robotics in everyday life.
Beyond interpersonal interactions, the Robo Sensor had practical environmental applications. It could measure room temperature, providing a level of ambient awareness useful in household or office settings. More critically, it had the capability to detect gas leaks, a safety feature that underscored the robot's utility in preventing potential hazards. This function was particularly significant, representing one of the early uses of robots in safeguarding human environments by monitoring for conditions that might not be immediately apparent to humans.
#10 Goro Robot, 1964

Goro, the robot introduced to Tokyo in 1964, was a significant cultural and technological phenomenon, reflecting the era's fascination with robotics and the future of interactive technology. Developed by a toy research firm, Goro was designed with features that were quite advanced for the time, particularly concerning its interactions with humans.
Standing five feet tall, Goro was not just a stationary figure but could walk in all directions. This mobility allowed Goro to engage more naturally with human counterparts, moving among them and participating in social environments. Such a feature might have seemed like a novelty but represented significant advancements in motor technology and robotic autonomy within a public context.
Beyond movement, Goro exhibited other human-like interactions that captured public imagination. The robot could bow to people it met, a gesture of respect and a common greeting in Japanese culture. This culturally specific behavior indicated a level of social awareness and adaptability, highlighting the developers' intentions for Goro to not just mimic human actions but to participate meaningfully within a cultural context.
Perhaps most intriguing was Goro's ability to "wink at the girls." This playful behavior suggests a level of individual recognition and interaction that was quite sophisticated for the period. It indicates a programmed behavior set that could differentiate individuals based on specific characteristics, adding a personal aspect to human-robot interactions.
#11 Barbarossa Robot, 1909
In 1909, a striking invention captured public attention in Berlin: the Barbarossa robot, also referred to as Occultus, crafted by the notable German inventor Herr Adolph Whitman. This early exploration into robotics stood out as a mechanical marvel during a period when even the most basic automation was considered futuristic.
Barbarossa was not merely a static display but boasted a repertoire of human-like functions that were revolutionary for its time. It was designed to walk, a complex task that indicated advanced engineering behind the robot's balance, propulsion, and direction. Achieving this level of bipedal automation in an era without modern computing was a testament to Whitman's intricate understanding of mechanics.
More than its mobility, Barbarossa could replicate social human interactions. It was equipped to speak, sing, whistle, and even laugh. These actions suggested the robot was capable of producing a range of sounds, indicating an early form of audio technology integration, possibly through mechanical phonographs housed within its framework. The ability to mimic these distinctly human nuances was a remarkable achievement, pushing the boundaries of what people understood machines could do.
Visually, Barbarossa was designed to closely resemble a human. At a short distance, observers could mistake it for a real person, highlighting the attention to detail in its external craftsmanship. This human-like appearance was more than cosmetic, as it marked an early understanding of what would later be known in robotics as the "uncanny valley" - the idea that human replicas elicit empathy, but if they are too realistic, they induce discomfort.
#12 Gygan, 1957

Standing eight feet tall and weighing a staggering 1,000 pounds, Gygan was not just an exhibit but an interactive technological demonstration. Its ability to shuffle forward, albeit at a slow pace of 10 feet per minute, showcased some of the earliest experiments in robotic mobility. This movement, while limited by today's standards, was a significant achievement at the time, hinting at the future possibilities for autonomous machines.
Gygan's features were designed to mimic human-like behaviors, an early example of what would become a standard in humanoid robotics. Its head could turn from left to right, allowing it a semblance of environmental awareness or interaction with onlookers. The robot's eyes, resembling car headlamps, would flash, adding to its human-like interaction capabilities. These features, while basic, were pivotal first steps in developing machines that could engage with their environment and human counterparts.
Controlled via radio, Gygan represented an early exploration into remote operability, a feature that remains crucial in modern robotics, drones, and even space exploration vehicles. Remote guidance allowed for the operators to control Gygan's movements and interactions, providing a safe and efficient means to demonstrate the robot's capabilities.
#13 Unimate Robot, 1961

In 1961, the landscape of industrial manufacturing was forever changed with the introduction of the Unimate robot at the General Motors Inland Fisher Guide Plant in Ewing Township, New Jersey. The brainchild of inventor George Devol, Unimate transcended previous attempts at automation with its unique combination of versatility, precision, and reliability, representing a significant leap forward in industrial technology.
The inception of Unimate followed years of meticulous research and development by Devol, culminating in a patented invention in the 1950s. The core idea was groundbreaking: an automated machine capable of handling and manipulating equipment in a manner previously reserved for human hands. This concept paved the way for an entirely new era of industrial automation.
Unimate was not a mere machine but a programmable manipulator capable of carrying out repetitive and dangerous tasks with consistent precision. It was initially deployed to transport die castings in the manufacturing process, a task fraught with hazards for human workers due to high temperatures and the risk of physical injury. But Unimate could withstand these conditions effortlessly, working tirelessly and with precision.
#14 Eric, British robot, 1928

In 1928, a significant event occurred in the annals of robotics: the introduction of Eric, the first British robot, a pioneering invention by Captain W.H. Richards. Eric was not just a technological marvel of his time but also a cultural icon that captured the public's imagination and the quintessentially British sensibility.
Constructed almost entirely from aluminum, giving him a suitably futuristic appeal, Eric was more than just a static piece of machinery. One of his key mechanical abilities was turning his head, a feature that might seem basic by today's standards but represented a significant achievement in the late 1920s. This capability demonstrated early exploratory steps in the realm of mimicking human physical movements, an aspect that remains central to the field of humanoid robotics.
Another of Eric's notable skills was his ability to bow, a movement requiring a complex coordination of parts for the execution of what can be considered respectful or ceremonial human gesture. This ability was particularly symbolic, allowing Eric to engage with audiences and dignitaries in a human-like manner, thereby personifying a machine in a way never seen before by the public.
#15 Arok Robot, 1970
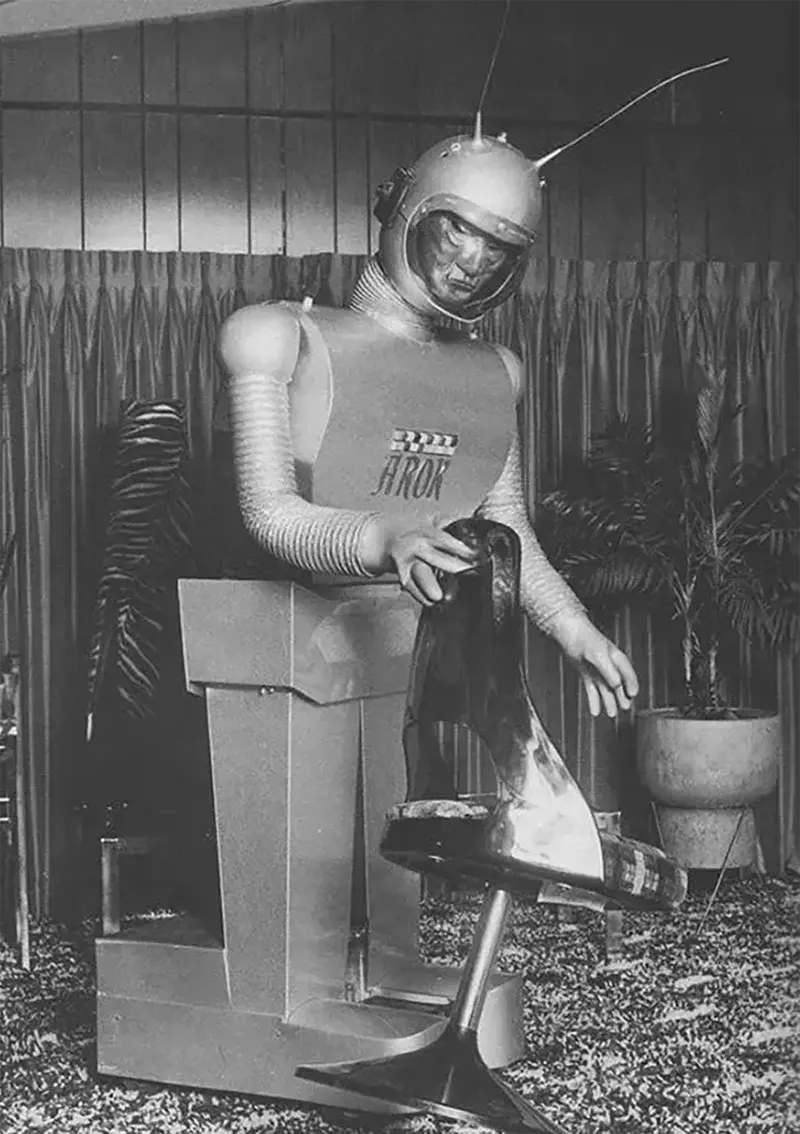
In the early 1970s, a noteworthy advancement in the field of personal robotics came in the form of Arok, a robot created by Ben Skora. Unlike many of its predecessors and contemporaries, Arok was designed for domestic assistance, showcasing an impressive array of functionalities that significantly surpassed the typical expectations of robotics during that era.
Arok's capabilities were diverse, reflecting a significant leap forward in personal robotics. The robot was capable of performing household chores, a notable feature being its ability to vacuum, reflecting early advancements in home automation technology. Additionally, Arok could mix drinks, integrating a level of finesse and precision in its operations that suggested potential applications in hospitality or culinary contexts.
One of the most interactive elements of Arok's design was its ability to engage in simple communication or talking, which represented an early exploration into human-robot interaction. This rudimentary form of 'social' robotics was a precursor to the sophisticated AI-powered social robots seen today.
Arok was also equipped with a camera system, allowing it to take photos, an early indication of integrating robotics with other forms of technology, hinting at the potential for surveillance or memory capture. Moreover, the robot possessed the strength to lift objects weighing up to 150 pounds, showcasing its utility in performing heavy-lifting tasks that could be challenging or risky for humans.
#16 The robot Maria from Metropolis, 1927
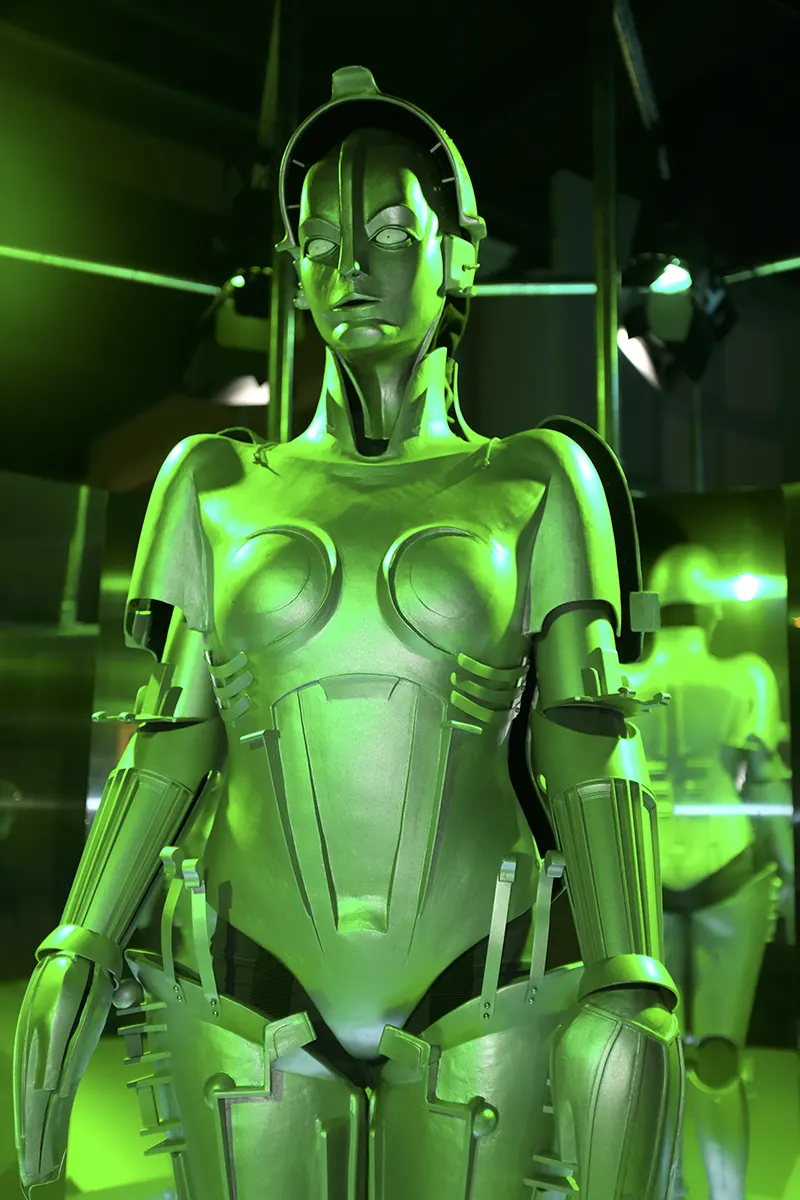
In 1927, the cinematic world was introduced to one of the most iconic figures in the realm of science fiction, the robot Maria from Fritz Lang's groundbreaking film, "Metropolis." This character wasn't just a robot; Maria embodied the anxieties and hopes of an era - standing as a symbol of technology's potential and its pitfalls.
Maria's design was revolutionary for the time. Crafted to mimic a human woman's form, her art deco-inspired appearance blurred the lines between a simplistic mechanized aesthetic and human resemblance, challenging audiences to see humanity within the machine. The metallic, gleaming surface, composed of a series of plates and gears, maintained an impression of something manufactured, yet the lifelike movements and expressions created an eerie juxtaposition to her clearly artificial origins.
In "Metropolis," Maria serves a complex narrative role. She isn't merely a display of technological prowess; she's central to the film's plot, embodying themes of deception, class conflict, and the misuse of technology. Created by the scientist Rotwang, the robot Maria is a perfect, indistinguishable replica of the protagonist Maria, who inspires and leads the workers. The robot's purpose, to sow discord among the city's working class, illustrates a prevalent theme: technology as a tool for control and subjugation. This was a poignant message at the heart of many industrial age anxieties.
Moreover, Maria's character was a feat of early special effects. The transformation scene, where the robot takes on Maria's visage, utilized pioneering techniques that astounded audiences and set a precedent for visual effects in cinema. This sequence, highlighting the duality between man and machine, became one of the most memorable in film history.